RLG ду меҳвари индексатсияи системаи навигатсионии инерсиалӣ




Тавсифи Маҳсулот
RL2-90 Системаи навигатсионии инерсиалӣ, як ҳалли пешрафта барои паймоиши дақиқ.Он бо гироскопи лазерии ҳалқаи навъи 90 ва акселерометри чандири кварс муҷаҳҳаз шудааст, ки маълумоти дақиқи суръат, мавқеъ ва муносибатро таъмин мекунад.Он ба таври бефосила бо GNSS, баландкӯҳҳо ва метрҳои суръати ҳаво муттаҳид шуда, онро барои интиқолдиҳандагони ҳавоӣ ва заминӣ мувофиқ месозад.Новобаста аз он ки дар танкҳо, мошинҳои зиреҳпӯш, ҳавопаймоҳо, дронҳо, киштиҳо ё роҳи оҳани баландсуръат, ин система назорати боэътимоди парвоз, мӯътадилсозии муносибат ва мавқеъро таъмин мекунад.Бо дақиқии баланд ҳам дар паймоиши софи инерсиалӣ ва ҳам шеваҳои паймоиши ҳамгирошуда, RL2-90 шарики боэътимоди шумо барои паймоиши боэътимод ва дақиқ дар барномаҳои гуногун мебошад.
PХУСУСИЯТХОИ МАХСУЛОТ
l Механизми индексатсияи ду меҳвар барои кам кардани хатогиҳо
l Гиростикии лазерии ҳалқаи дақиқи баланд ва акселерометри кварц
l Ҳамоҳангсозии ихтиёрии пойгоҳи статикӣ ё ҳаракаткунанда
l Хатои параметрҳои калибрченкунӣ ва ҷуброн дар диапазони пурраи ҳарорат
l Интерфейсҳои гуногуни вуруди ихтиёрӣ барои GNSS/Odometer/DVL
l Усулҳои паймоиши танзимшаванда
l Мутобиқати аъло ба муҳити зист
l Стандартҳои ҳарбӣ
AМАЙДОНҲОИ ИБРАТ
l Навигатсияи нақлиёти зери баҳр
l Ҷойгиркунӣ ва ҷустуҷӯи шимол барои нақлиёти заминӣ
l Муътадилсозӣ ва назорат барои интиқолдиҳандаи ҳаракаткунанда
l Андозагирии муносибат барои барномаҳои серталаб
MAIN ФУНКЦИЯҲО
l Он дорои функсияи баровардани иттилоот ба монанди мавқеи интиқолдиҳанда, сарлавҳа, кунҷи муносибат, суръати кунҷӣ ва суръат дар вақти воқеӣ;
l Он дорои шеваҳои корӣ ба монанди паймоиши инерсиалӣ ва INS/GNSS (аз ҷумла Beidou) паймоиши ҳамгирошуда;
l Дорои вазифаи қабули иттилооти навигатсионии моҳвораӣ, ки аз ҷониби таҷҳизоти стандартии басомади вақти беруна пешбинӣ шудааст;
l Он дорои вазифаи худидоракунии замин ва дастгирӣ вазифаи ҳамоҳангсозии ҳаво;
l Он дорои вазифаҳо, аз қабили худтанзимкунии барқ, санҷиши даврии худ, гузориши вазъ, ҷуброни хатогиҳои насб ва нигаҳдории ғайридавлатӣ.
PНИШОНДИХАНДАГОНИ КОР
| Дақиқии система Дақиқии система | Навигатсияи тозаи инерсиалӣ / Навигатсияи тозаи инерсиалӣ | 2,0нмил/5д, ҚУЛҲ | |
| Навигатсия / Навигатсия бо GNSS | ≤5м, 1σ | ||
| Кунҷи сарлавҳа / Сарлавҳа | 0,01°, RMS | ||
| Муносибати уфуқӣ (рол ва қатрон) Муносибати уфуқӣ (рол ва қатрон) | 0,005°, RMS | ||
| Суръати тозаи инерсиалӣ | 1,0 м/с, RMS | ||
| GNSS Суръати муттаҳидшудаи паймоиш | 0. 1 м/с, RMS | ||
| Нишондиҳандаҳои дастгоҳҳои инерсиалӣ Параметрҳои Gyro ва Accelerometer | гироскопи лазерӣ _ Гироскоп | Диапазон/диапазон | ± 6 00 градус/с |
| Устувории ғаразнок | ≤0,002 градус/соат, 1σ | ||
| Такрори такрорӣ | ≤0,002 градус/соат, 1σ | ||
| Миқёс Омили ғайрихаттӣ | 1 саҳ | ||
| Акселерометр Акселерометр | Диапазон/диапазон | ± 15г | |
| Устувории ғаразнок | ≤10мкг, 1σ | ||
| Такрорпазирии сифр Такрори такрорӣ | ≤10мкг, 1σ | ||
| Миқёс Омили ғайрихаттӣ | 15 саҳ | ||
| вақтро ҳамоҳанг созед Вақти ҳамоҳангсозӣ | Оғози сард | ≤ 15 дақ | |
| Оғози дубора | ≤ 10 дақ | ||
| Оғози ҳаво/дар парвоз | ≤15дақ | ||
| Соатҳои корӣ Вақти амалиёт | Вақти кори доимӣ / Вақти амалиёт | зиёда аз 10 соат | |
| Хусусиятҳои интерфейс интерфейс | Шиддати таъминот / шиддат | 18 ~ 36VDC | |
| Истеъмоли қувваи барқ | ≤ 40Вт @ 24VDC | ||
| Интерфейси барқӣ / барқ | RS232 × 2 RS422 × 3 МЕТАВОНАД × 2 Ethernet × 1 1 саҳ. × 1 | ||
| Меъёри навсозии маълумот (конфигуратсияшаванда) | 200Hz@115.2kbps | ||
| Муҳити зистро истифода баред Муҳити зист | Ҳарорати корӣ | -40°C~+65°C | |
| Ҳарорати нигоҳдорӣ / Ҳарорати нигоҳдорӣ | -55°C~+85°C | ||
| Баландӣ/баландиро истифода баред | 20000м | ||
| Намӣ | 95% (+25°C) | ||
| Вибрация / Вибрация | 5г @ 20~2000Гц | ||
| Шок/Шок | 40 г, 11 мс, 1/2 синус | ||
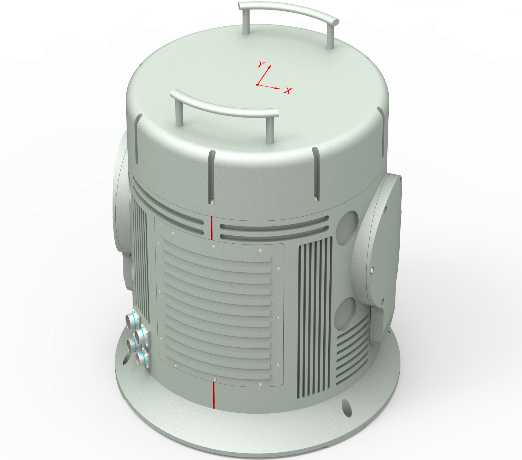
| Хусусиятҳои физикӣ ҷисмонӣ | Андоза/ Андоза (Φ*H) | 540 х 536мм | |
| Вазн / Вазн | 55 кг | ||
Эзоҳ: Сохторро мувофиқи талаботи корбар фармоиш додан мумкин аст.